High-accuracy robotic system for precise object manipulation (HARISOM)
Grant: EP/T023805/1
Funding: EPSRC
Duration: April 2020 – April 2023
Team: David Branson, Samanta Piano, Richard Leach, Wahyudin Syam, Mohammed Isa
Partners: CERN, AMRC, Labman Automation, NuVision Ophthalmics, Taraz Metrology
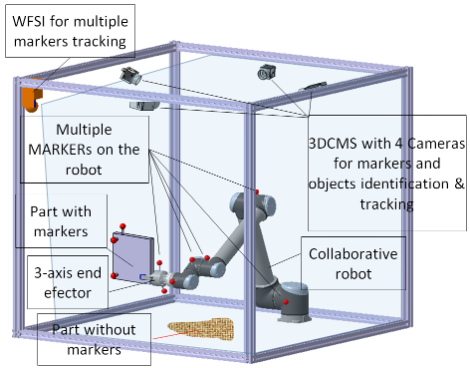
This project combines state-of-the art metrology and computer science to increase by an order of magnitude the positional accuracy of industrial robots within large working volumes (exceeding 1 m3), and will enable for the first time precise object manipulation across many application areas. The novelty and innovation lies in the use of an intelligent framework to compensate for systematic and random errors, based on a new Bayesian learning algorithm for accurate real-time object tracking by utilising measurement data from a novel combination of interferometer and 3D vision measuring instruments. Results from this research will take industrial robots, especially collaborative robots, to the next level of industrial applications to reduce costs, increase production efficiency and open up previously unexplored applications.