Research Projects
Enabling Technologies for Actuated Continuum Surfaces Undergoing Large Deformations
Members:
Controllable Large Displacement Continuum Surfaces, LCDS, hold the potential for application across a diverse range of applications including the highly dexterous manipulation of parts in manufacturing environments, soft/flexible exoskeleton systems in healthcare, and jointless surface control in the aerospace, automotive, energy and food processing industries. The problem is that to date LDCS operate in ‘open loop’ with little or no sensor feedback capability to maintain desired curvature under changing conditions, or consideration as to how external forces might best be accounted for. Additionally, placement of actuation elements on the surface to achieve complex profiles is largely accomplished through user intuition and experience, limiting efficiency at the design stage. This results in ‘trial and error’ methods to LDCS design and control that increase production costs and reduce surface performance under operation. To move beyond ‘trial by error’ design and control of LDCS undergoing large elastic deformations, accurate, yet computationally efficient, methodologies to model in both the kinematic and dynamic domains are required for control development and to assist in their design.
This is an EPSRC funded project (EP/N022505/1) looking to advance the use of LDCS into the next realm by providing the tools necessary to enable robust procedures for their design and control based not on ‘trial and error’, but physical model information within an accurate and efficient structure. This will make direct, meaningful contributions to the use of LDCS across a number of areas including mouldless manufacture of carbon fibre parts, highly dexterous manipulation of parts in manufacturing environments, soft/flexible exoskeleton systems in healthcare, and deformable surface control in the aerospace, automotive, energy and food processing industries. Academic collaborators include Dr Kormushev, Imperial College London, UK, Prof Walker, Clemson University, USA, Prof Webster and Dr Godage, Vanderbilt University, USA, and Dr Kang, Tianjin Polytechnic University, China.
Fabric Based Sensor systems
Members:
Over the past decades, wearable sensors have gained the interest of researchers and clinicians thanks to their advantages. Compared with standard measurement systems based on image-based techniques such as the APAS or VICON systems) that requires the user to be in a specially outfitted room, wearable systems comprising multiple inertial motion sensors (consisting of accelerometers, gyroscopes, and polymer based fabrics) fixed on lower limb segments enable capturing the kinematics of lower limbs such as joints angles and limb orientation during ambulation. These systems are: lightweight, not bulky, flexible, fitted closely to the human body, can be used within various application areas (e.g. health, military, domestic) and capable of recording motion outside. While a number of sensor systems are being utilized as “wearable” technology they are actually composed of multiple sensor systems attached externally to the clothing being worn.
Despite their advantages, current wearable sensors suffer from several drawbacks depending on the type used. They must be placed correctly and securely, account for gravity, noise and signal drift, and multiple components must be removed for cleaning of the garment. In some cases they must also be placed on the skin of the patient, do not record whole body movements (e.g. smart watches and/or phones) or have not properly considered user preferences thus affecting uptake of systems. All of these factors will influence the subject’s behaviour during measurements of interest, further decreasing effectiveness.
Combining stainless steel with polyester fibres adds an attractive conductive behaviour to the yarn. Once knitted in such a manner, fabrics develop sensing properties that make the textiles, also known as e-textiles, suitable for smart/wearable applications. The advantages to using fabric are that they are more resilient, stronger and can be used across a wider range of temperatures than polymer based sensors currently considered for similar applications. The work pursued to date has concerned the investigation of the electrical properties exhibited by knitted conductive fabrics, made of a combination of stainless steel and polyester fibres (© Footfalls & Heartbeats (UK) Limited). The aim is to study the usability of electrically conductive textiles as sensors to be embedded into garments for human motion capture. Further uses for fabric based sensors include determining surface force and displacement profiles associated with research on large deformation surfaces. This work is being undertaken in collaboration with Footfalls & Heartbeats and the Bioengineering research group.
Achieving Powered Assisted Motion of the Trunk without an Articulated Exoskeleton
Coming soon
In-situ monitoring of thermoforming of composite components, with a focus on profiling of defects
Supervisors:
Companies/Sponsors:
This research is based around the understanding of thermal roll forming of composite laminates. The focus is to develop our understanding of the factors that lead to the creation of defects during the forming process of large-scale composite parts. To this end an in-situ monitoring systems has been designed to capture information on the parameters that affect the material during forming across a number of shapes and forming parameters such as temperature, roll velocity, etc. By experimentally gaining this information a methodology/program can be designed and implemented to reduce the likelihood of defects forming when the process is applied over a number of different forming geometries. This work is being undertaken in collaboration with Airbus
Aircraft assembly operations
Automated Spinal surgery using parallel kinematic and continuum Robots
Members:
Spine injuries or abnormalities can result in significant deviations from their (relative straight) orientations. Currently, surgical robots are not able to reference their end-effectors in a dynamic mode to patient movements (e.g. breathing and flexible nature of the human body) during surgery; moreover, they are bulky and present limited versatility due to the need for specialized surgery theatres. This research, run collaboratively with the Bioengineering, Queen’s Medical Centre - Nottingham (QMC) and Machining and Condition Monitoring Research Team, investigates the use of robotic systems to perform precision surgical procedures. This will lead to automated technologies that greatly increase patient safety, while reducing surgery costs and the need for specialized operation theatres through robotic systems that are smaller and more versatile.
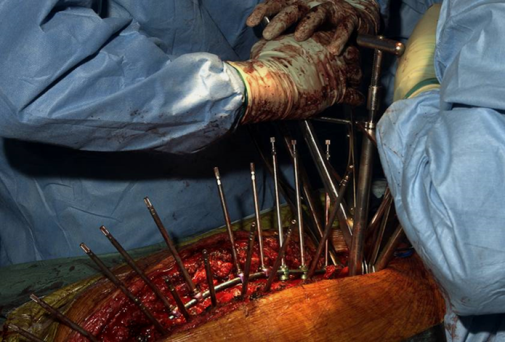 Manual spinal surgery (courtesy to Dr. Boszczyk, QMC – Nottingham
Manual spinal surgery (courtesy to Dr. Boszczyk, QMC – Nottingham
Improving neonatal outcomes with an evidence-based multi-disciplinary developed transport systems
Members:
The centralisation of specialist neonatal care services means that many premature infants need to be transferred to such centres during the first few days of their lives with around 16,000 (UK) and 70,000 (USA) babies moved each year. Unfortunately this need occurs at the time when they are most vulnerable. Minimising the risks due to vibration, noise and crash safety associated with such transport is the aim of this collaborative project between the University of Nottingham, Queen’s Medical Centre - Nottingham and a company who make infant transport incubators, Evac+Chair International Ltd. Results will produce the next generation of neonatal transport systems to reduce the noise and vibration experienced to a level such that the journey is much less stressful and therefore the risk of brain injury significantly reduced. This work will also provide the first live feedback system for noise/vibration exposure allowing steps to be taken during the journey to further reduce exposure. In addition, this redesign of the transport incubator will provide the opportunity to address known failings in current neonatal restraint mechanisms (i.e. the baby's ‘safety belt’) that are necessary as they are currently predicted to be less effective than is desirable. Funding for this work is support by a number of sources including the Medical Research Council, MRC, and National Institute for Health Research, UK.
Intelligent Flow Control in Power plants
Members:
This collaborative project funded by Innovate UK and led by Greenbank Group (GB) will develop an Integrated Flow Control System (IFCS) for Coal Fired Power Stations (CFPS) that is fully automated and adjusts to suit modulation in flow performance of mill, fuel types, quality, wear & load, providing flow feedback allowing burners to help achieve optimum stochiometric conditions (within +/- 2%) thereby increasing efficiency & reducing emissions. The objective is to build and integrate a prototype system at DRAX, the largest CFPS in the UK to verify efficiency & effectiveness through long term testing. This work involves: background research & plant data collection; development & modification of Pulverised Fuel Monitoring Systems (PFMS); Modifications to Particle Size Analyser (PSA); Software development; Plant installation, testing & verification. Final output includes design & testing of a system that will assist in meeting all aspects of improving the efficiency of fossil fuels use.
In addition to the research projects found within the Nottingham Advanced Robotics Laboratory, we also occasionally run undergraduate final year, 3rd year group design and make, summer projects, and Erasmus placements on a number of other topics including:
- The Freefall Camera - A group of student skydiving enthusiasts desired to design, construct a skydiving robot to take video capture during freefall. They then went on to do final year projects on individual parts of the system and are now working to make the results a sellable product.
- Modelling, design and construction of an exoskeleton that will enable a paralyzed person to skydive
- Robotic learning - These cover a number of applications looking at robotic systems learning on their own how to achieve certain tasks.
- Using the NAO robot to teach schoolchildren with learning disabilities
- Manipulation of deformable objects
- Coordinated motion with multiple robot arms
- Continuum legged walking robots
- Computer vision recognition
If you have an interest in these or other topics Dr Branson will be happy to consider them as resources and time allow. If you are a University of Nottingham M3 undergraduate and/or overseas Erasmus candidate, please contact him in person to discuss.